 | Hybrid Motion Planning for Autonomous Driving project page / link HMPL is a real-time C++ motion planning library for autonomous driving that is able to handle task constraints, geometry constraints, nonholonomic constraints and dynamics constraints of cars in a human-like and layered fasion. |
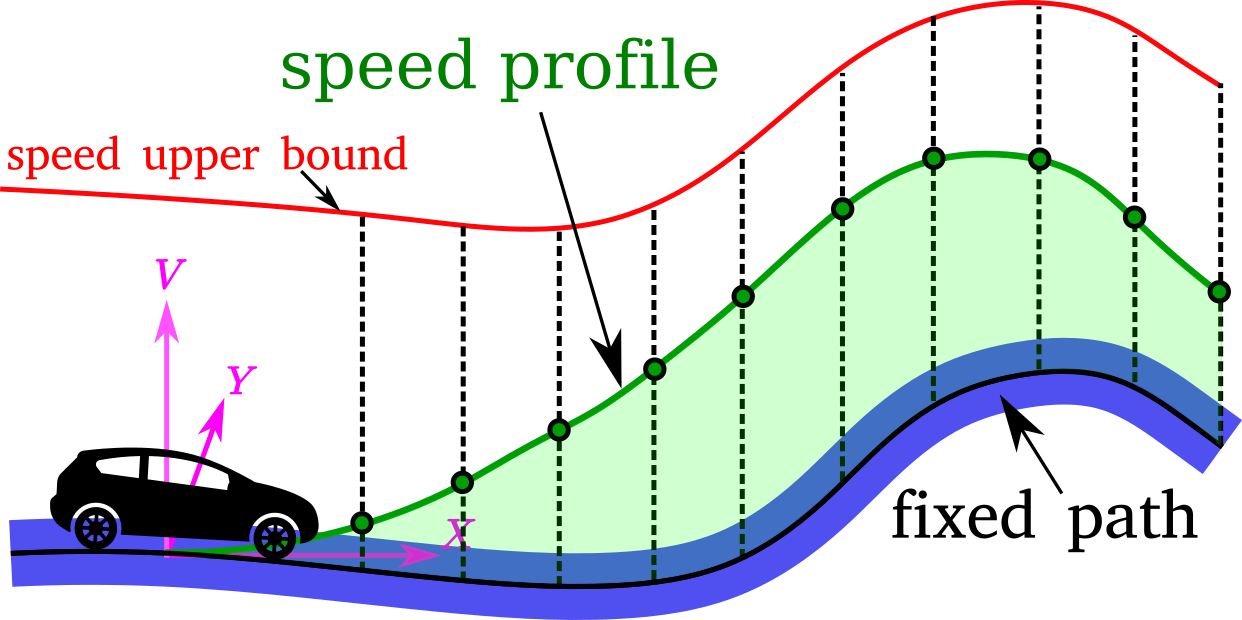 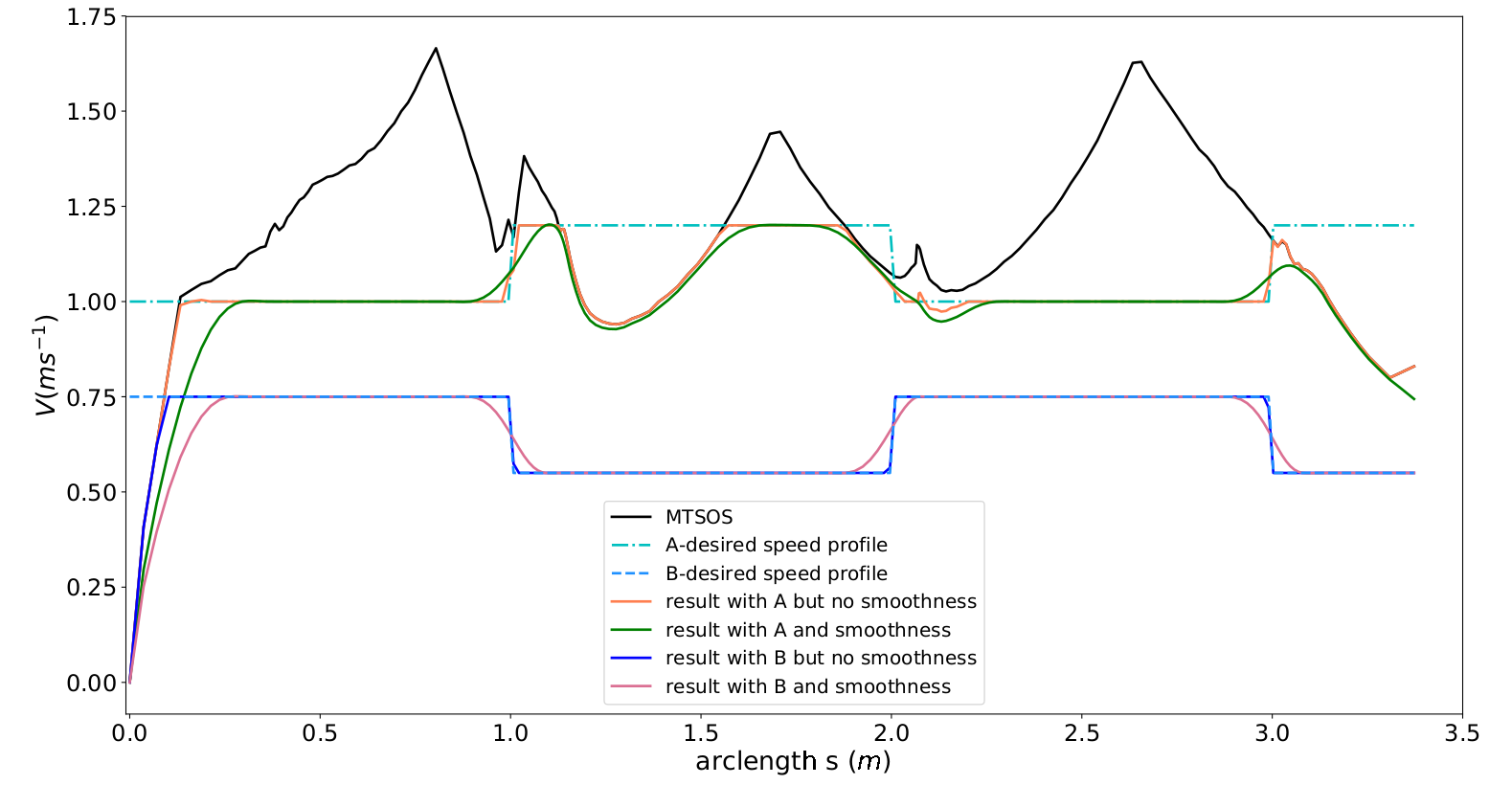 | Convex-optimization-based Speed Planning for Autonomous Driving project page / link / gallery Speed planning plays an important role in guaranteeing the ride comfort and safety in autonomous driving applications. To address this problem, we develop a complete, flexible, safe, and globally-optimal convex-optimization-based method to solve speed planning problems over a fixed path for autonomous driving in both static and dynamic environments. |
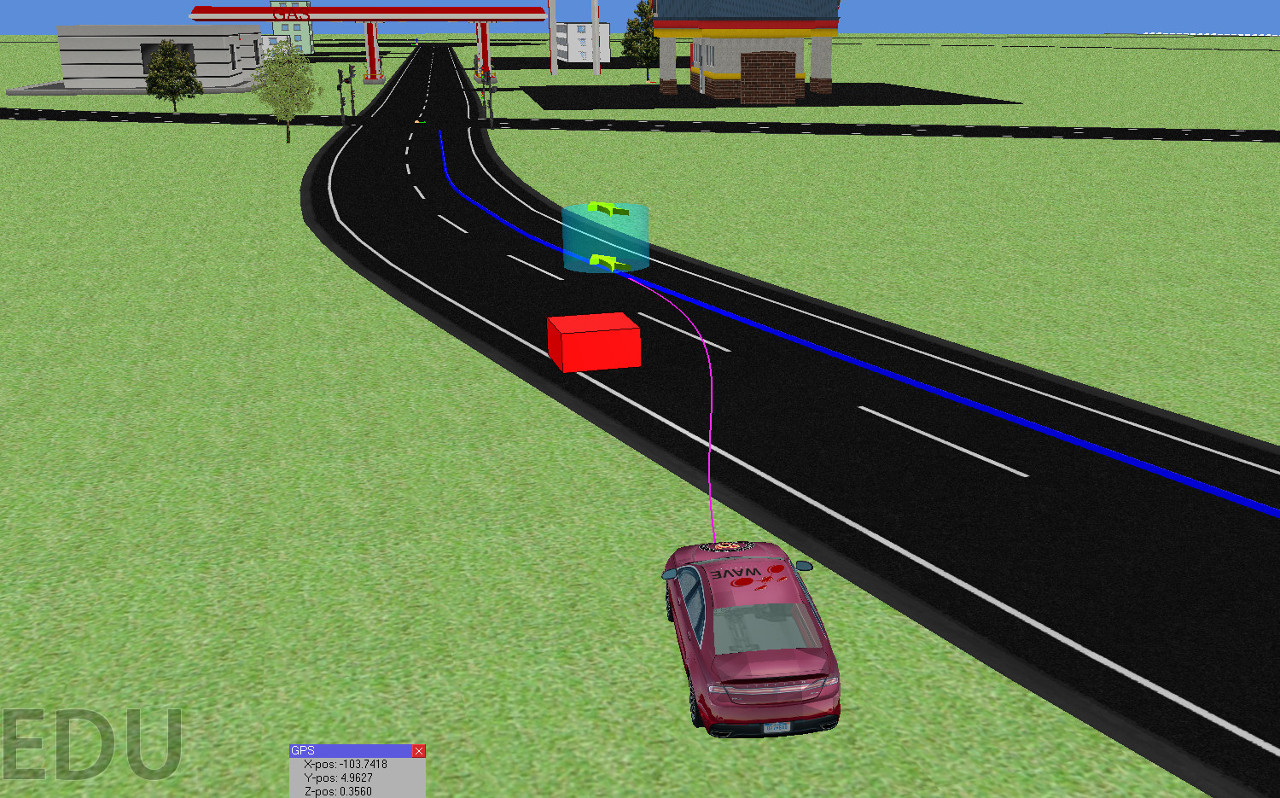
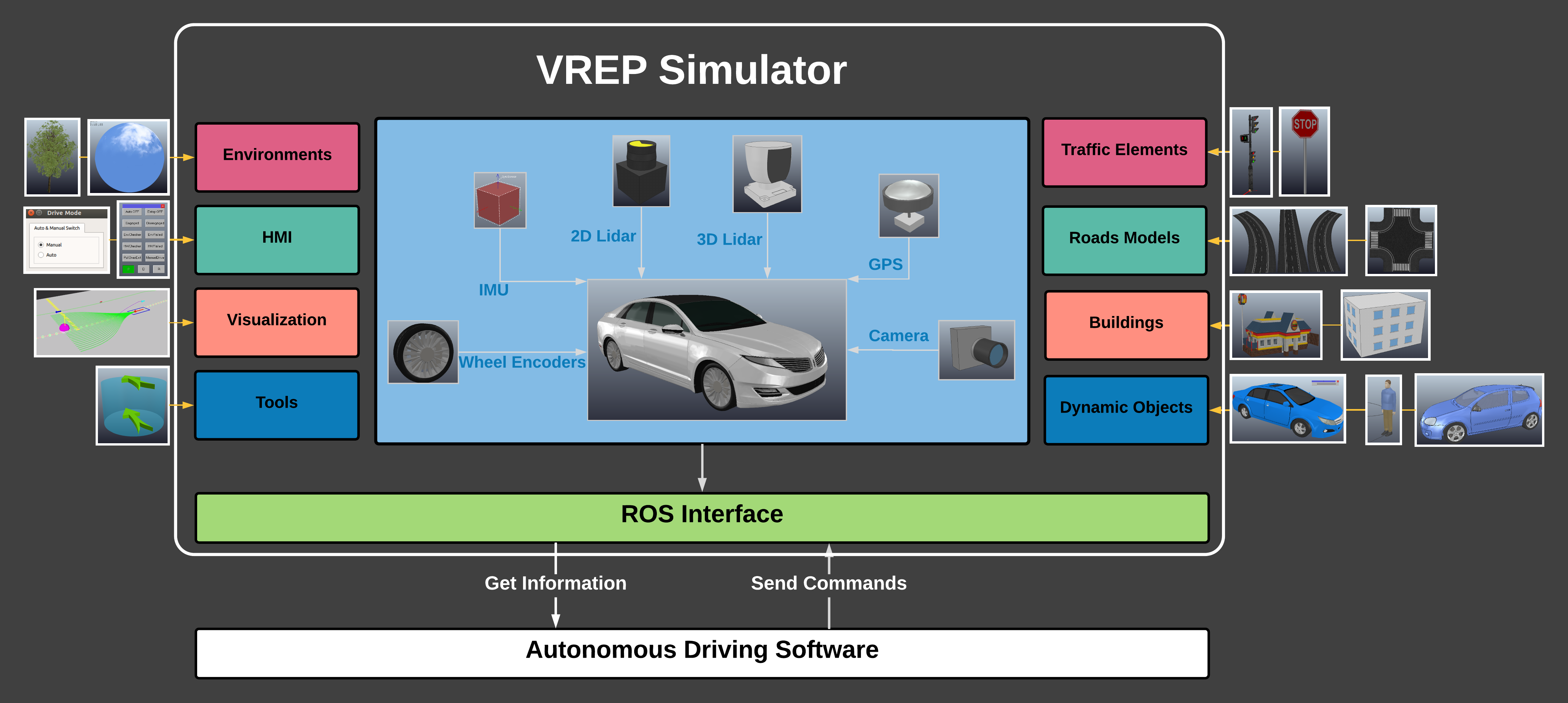 | Lightweight and Flexible Simulation Toolset for Autonomous Driving A summary of my simulation work for supporting the development of motion planning algorithms |